|

|

|

|

|

|

|

Presné vychyľovanie laserového lúča
© Ing. Radovan Konečný - radkon, 2011
O projekte
Cieľom projektu bolo zhotoviť optický systém schopný vychyľovať laserový lúč v dvoch navzájom kolmých smeroch (X a Y) tak, aby bolo možné pomocou tohto zariadenia premietať veľké nákresy na papier alebo drevo. Nákresy by mohli byť veľké aj 2 metre a bolo nutné, aby laserový lúč kreslil s presnosťou lepšou ako 1 mm. Nákres sa samozrejme nemal vykresľovať takou rýchlosťou, aby vznikol dojem celistvého obrysu, ale mali sa vyznačovať body, ktorých ručným zakreslením a pospájaním by vznikol nákres. Cieľom nebolo vytvoriť laserovú šou, ale projekčný systém potrebný na zhotovenie veľkých nákresov v mierke 1:1.
Prvými úvahami bolo skúsiť vychyľovať laserový lúč zrkadielkami, ktoré budú otáčané krokovými motorčekmi. Hlavný problém tohto riešenia je však malá dosiahnuteľná presnosť. Aj pri riadení krokových motorov mikrokrokmi by bol aj tak nutný prevod, ktorý však vnáša nepresnosti.
Druhým nápadom bolo použitie elektromagnetického otáčania zrkadielok. Prvým neúspešným pokusom bolo použitie ručičkového meracieho prístroja. Zariadenie bolo neuveriteľne náchylné na otrasy.
Tretím nápadom bolo použitie elektromagnetu zo starého harddisku (otáčanie hlavičiek). Po rozobraní a pár testoch s jednoduchým riadením elektromagnetu a pridanou pružinou sa spôsob ukázal ako úplne zlý a nepresný.
Prvé úspechy prinieslo až použitie elektromagnetu z harddisku riadeného ako elektromagnetické servo (tak ako je riadené vo funkčnom harddisku). Toto riešenie vôbec nebolo jednoduché - vyžadovalo zhotovenie (najprv provizórneho) snímača otočenia a pomerne zložitú elektroniku. Prvé pokusy aj s laserovým lúčom však priniesli uspokojivé výsledky - takýto systém by mohol byť dostatočne presný na dané účely.
Tajomstvo úspechu zariadenia pre vychyľovanie jedného zrkadielka tkvelo v kvalitnom snímači otočenia a dobrých riadiacich elektronických obvodoch. Snímač však nemusel byť presný - všetky korekcie by sa robili softvérovo. Musel mať však vlastnosť jednoznačnosti - pre každý uhol musela existovať práve jediná hodnota elektrickej veličiny.
Pár fotiek z prvých pokusov:

















Ako funguje elektromagnetické servo?
Princíp serva (vo všeobecnosti) je v meraní odchýlky od požadovanej polohy a vykonaní potrebnej mechanickej zmeny, aby sa odchýlka minimalizovala. Elektromagnetické servo používa ako pohon elektromagnet (cievka v magnetickom poli magnetov) a pretekaním prúdu cez túto cievku vzniká pohyb buď jedným alebo druhým smerom. Smer závisí od smeru prúdu. Takýmto elektromagnetom by sa však nedokázalo docieliť zastavenie na požadovanej polohe. Na to, aby toto bolo možné, je potrebné merať polohu pohyblivej časti a do cievky púšťať prúd pokým sa pohyblivá časť nedostane do požadovanej polohy. Ide teda o spätnú väzbu, ktorá v sebe zahŕňa snímanie polohy, porovnanie s požadovanou hodnotou, vyhodnotenie potrebnej korekcie a vpustenie prúdu do cievky elektromagnetu. Tento systém pracuje samozrejme za použitia vhodnej elektroniky dostatočne rýchlo (oveľa rýchlejšie ako sú ľudské zmysly schopné zachytiť).
V prípade elektromagnetického serva z harddisku je snímanie polohy hlavičiek zabezpečované špeciálnou sekvenciou dát uložených „napevno“ na disku. Vďaka tomu spätná väzba „vie“, kde sa hlavička práve nachádza a podľa toho púšťa prúd do cievky. Ak je hlavička na správnom mieste, do cievky sa nepúšťa žiadny prúd.
Po „vykuchaní“ harddisku treba snímanie polohy otočnej časti dorobiť. Pôvodné snímanie polohy cez dáta na disku nie je prakticky možné použiť - bolo by treba využiť pomerne veľkú časť pôvodnej elektroniky harddisku a tú zvyšnú „odstaviť“, aby servo fungovalo podľa našich predstáv (ak to niekto dokáže, osobne mu zablahoželám).
Servo v mojich službách
Snímanie polohy otočnej časti som sa rozhodol robiť opticky - medzi infračervenú LED a infračervený fototranzistor je umiestnená clona, ktorá otáčaním mení množstvo infračerveného svetla medzi LED a fototranzistorom (pozri fotku alebo druhú fotku). Prúd prechádzajúci fototranzistorom závisí od dopadajúceho svetla. Vhodnou elektronikou som previedol tento prúd na napätie a zároveň sa vykoná čiastočná linearizácia (aby bolo napätie zhruba lineárne závislé od uhla otočenia).
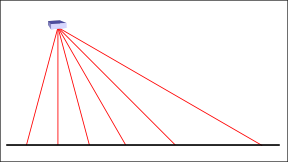
Ako zdroj napätia určujúceho požadovanú polohu serva som použil 10-bitový PWM D/A prevodník (mikropočítač PIC) s pridanými ďalšími (aspoň dvomi) bitmi zvyšujúcimi rozlíšenie. Pri rozlíšení 12 bitov (10 bitov PWM a 2 bity analógovo) mám k dispozícii 212 = 4096 hodnôt napätia. Teoreticky by to znamenalo presnosť projekcie 2m / 4096 = 0.49mm. Treba však počítať aj s nelinearitou - okrem nie celkom lineárnej charakteristiky snímača otočenia pribudne aj nelinearita spôsobená samotnou projekciou na rovnú plochu: